Gizmo
Innovation Design Engineering | 2018
The goal of this project was to create a machine that effectively integrates machine elements, sensors and actuators and code to perform an iterative interaction. Create an interaction in which the user experiences the machine’s b initial response, and takes more action, in a continued loop. Since I was more familiar with coding, I wanted to step outside my comfort zone by challenging myself to play around more with physical mechanics. With budget and time limits, I had to get creative to achieve the effect I wanted.
Inspiration
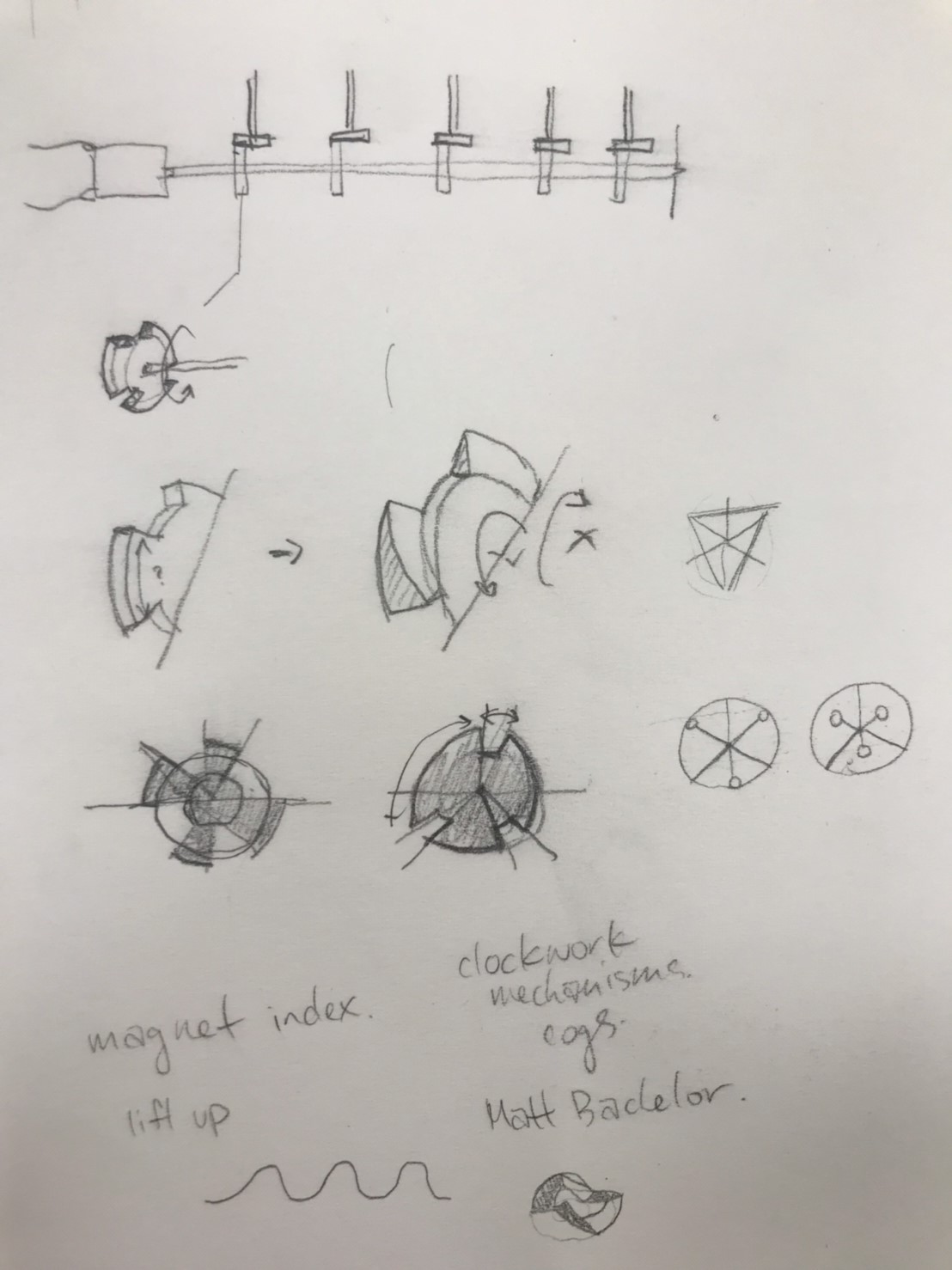
I wanted to recreate the soothing cascade of panels from the Design Museum’s “User Maker Designer” installation and add an interactive element. However, the installation uses individual motors that control each panel, which I simply don’t have the budget for. The majority of the time was spent looking at different physical mechanisms to identify which ones could be modified to serve my needs.
Prototyping
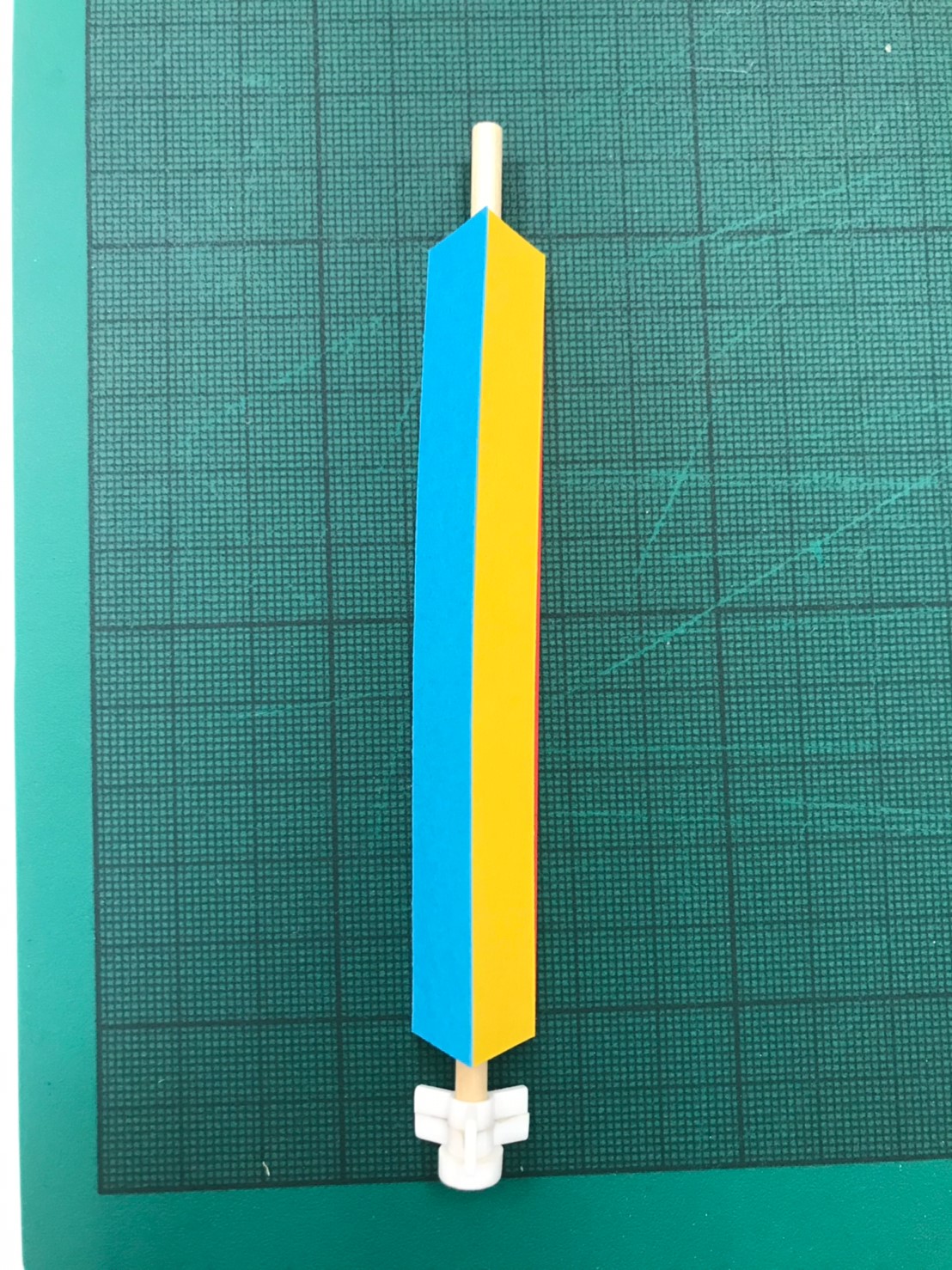
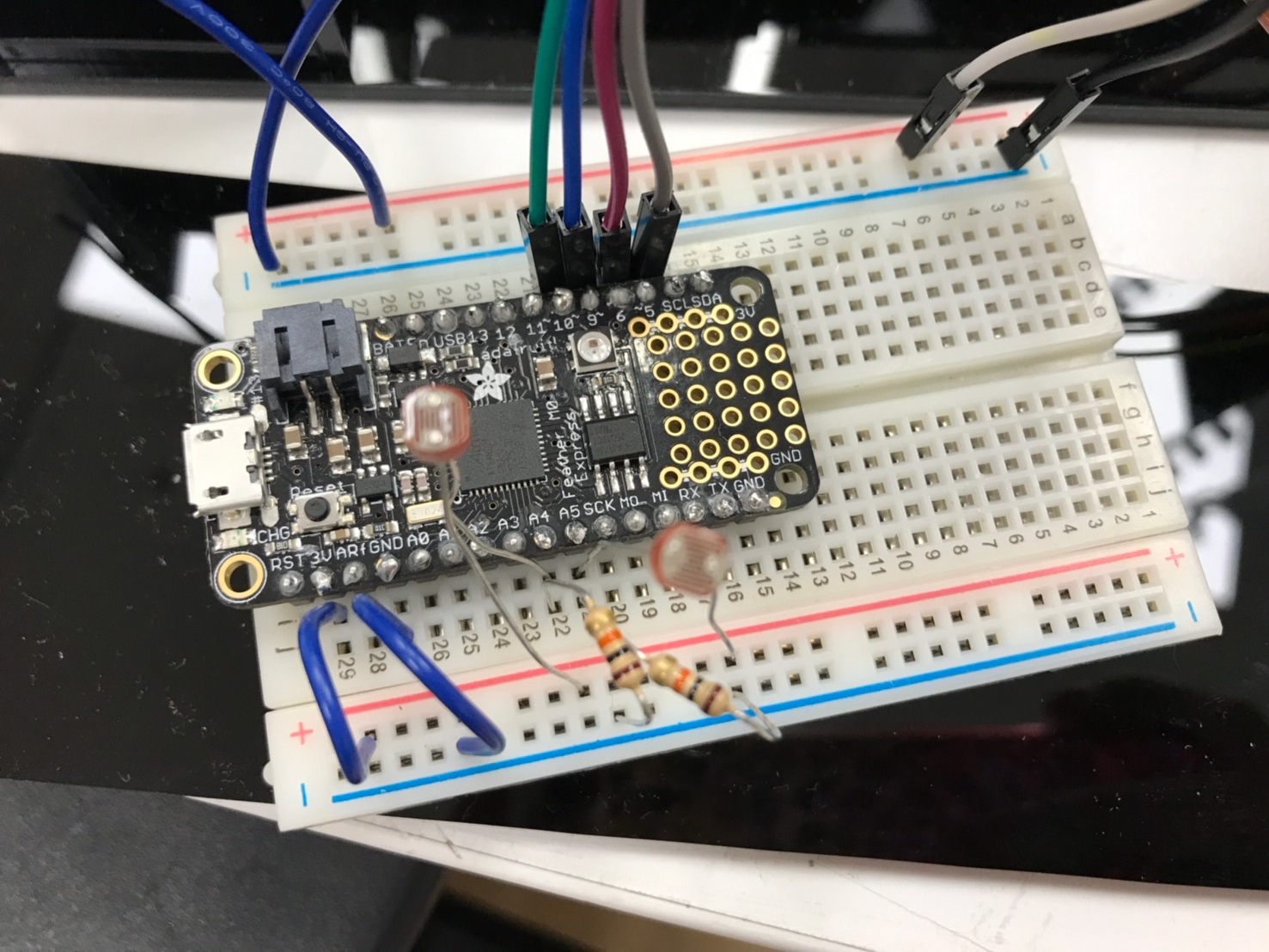
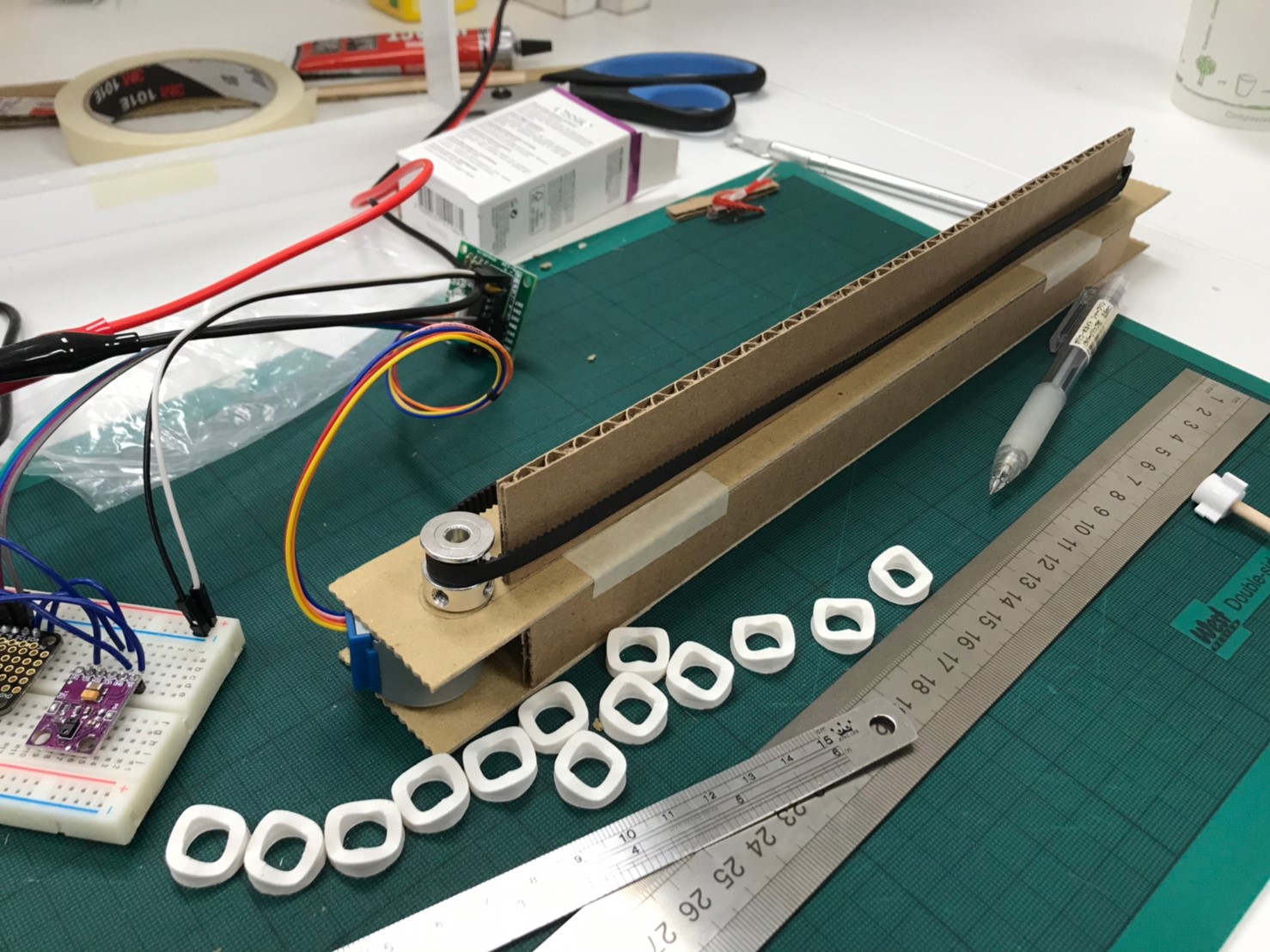
I started with simple cardboard models to test and validate designs before investing in the components. This project more than the others required good time management and timing as I had to take into consideration shipping time for components. Some components arrived and were broken, forcing me to make last minute functions from scratch to carry out the design. Originally, I had ordered a gesture sensor from a third party distributor, but when it arrived, it seemed the infrared sensors were broken. As a result, I had to quickly make my own gesture sensor by detecting the timing differences in light change between two light theremins. The end result was far from perfect, but I believe given more time, I could have a more polished gizmo. I learned that although I was confident in the electrical/coding component of the project, I should still take care to calculate errors and mishaps into the scheduling.
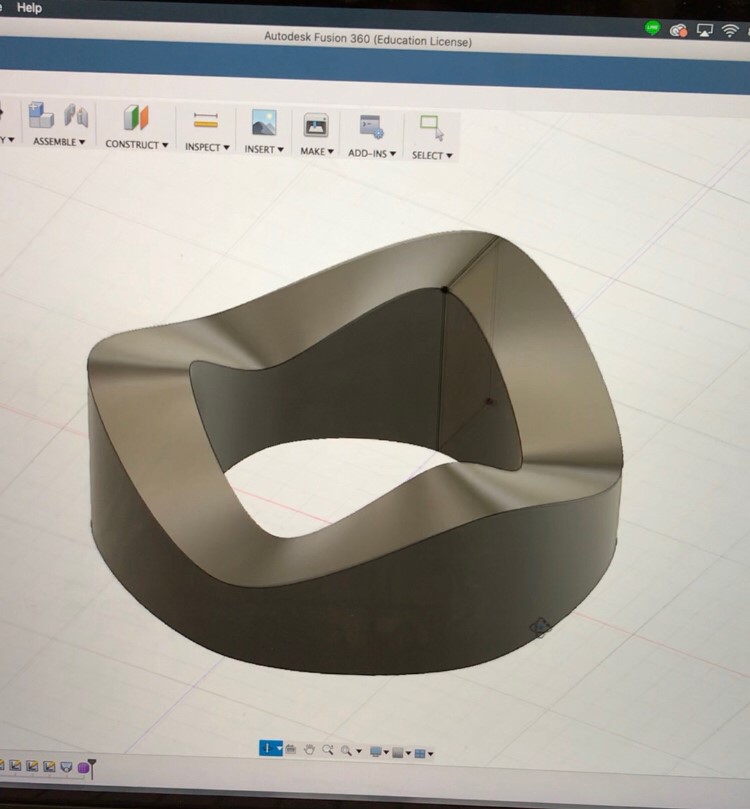
For this project, I created a custom indexing mechanism that could work both ways for the 3 panels.